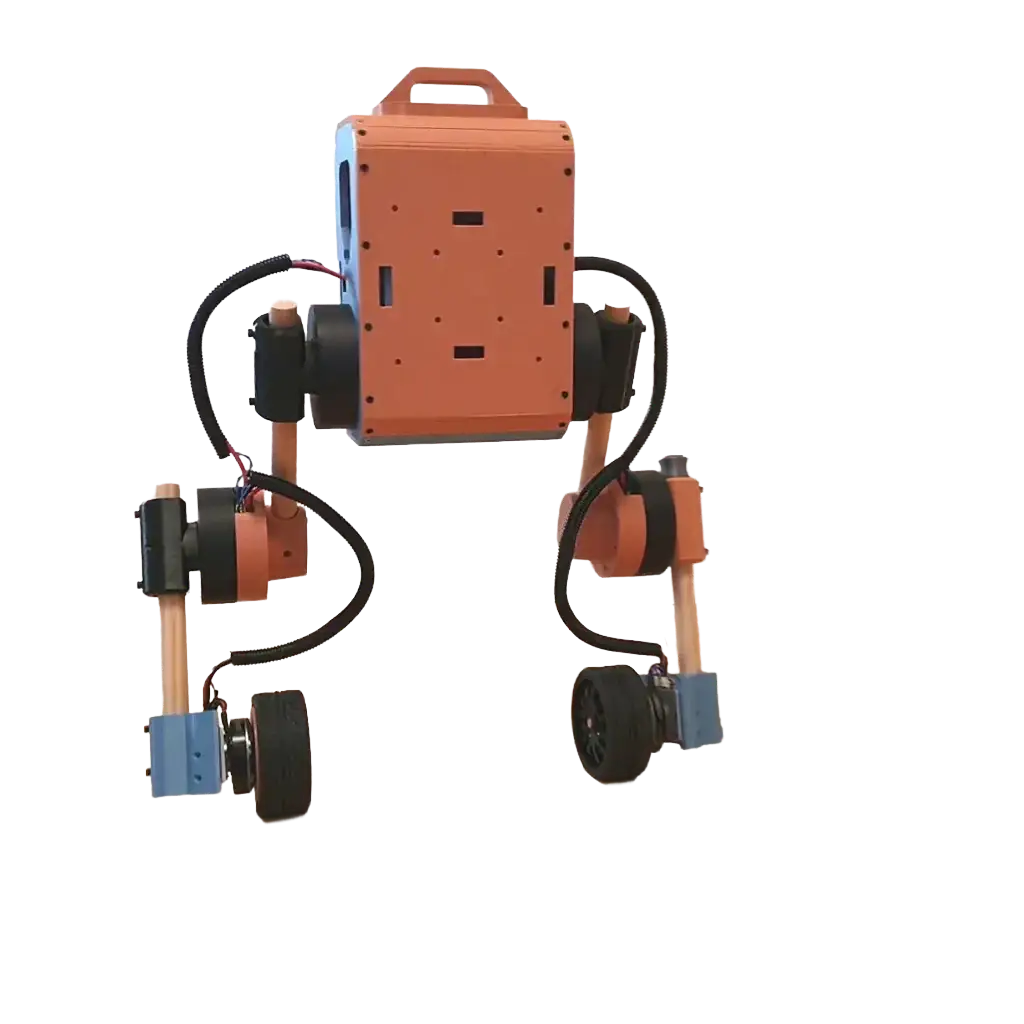
Upkie is a fully open-source self-balancing wheeled biped robot designed to provide a flexible and customizable platform for robot enthusiasts, engineers, and makers. It combines self-balancing technology, robot motion control, and open-source hardware, allowing users to build their own robotic projects. Upkie aims to empower individuals and promote innovation in the field of robotics by offering an accessible and transparent platform for exploration and experimentation.
Key Features
- Self-Balancing Capability: At the core of Upkie’s design is its self-balancing capability. Utilizing advanced gyroscope and accelerometer sensors, Upkie can maintain a stable upright posture, dynamically adjusting its movements to counteract external forces and disturbances. This feature not only adds to the robot’s visual appeal but also enables it to navigate various terrains while carrying payloads.
- Biped Design: Upkie’s biped design, inspired by human gait, provides a more natural and efficient mode of locomotion compared to traditional wheeled or tracked robots. With two independently controlled legs, Upkie can maneuver through tight spaces, climb stairs, and tackle uneven surfaces, offering enhanced mobility and versatility.
- Open-Source Hardware: One of Upkie’s most significant strengths lies in its open-source hardware design. All schematics, CAD models, and documentation are freely available, allowing users to modify, customize, and even replicate the hardware according to their specific needs. This open approach encourages collaboration, shared knowledge, and accelerates innovation within the robotics community.
- ROS Support: Upkie is fully compatible with the Robot Operating System (ROS), a widely adopted framework for robot software development. This integration enables users to leverage the vast ecosystem of ROS tools, libraries, and packages, facilitating advanced programming, simulations, and integration with other robotic systems.
Technical Specifications
- Processor: Upkie is equipped with a powerful ARM Cortex-M series processor, providing ample computational power for real-time control and data processing.
- Sensors: In addition to the gyroscope and accelerometer for self-balancing, Upkie features encoders for precise position and velocity feedback, ensuring accurate motion control.
- Communication Interfaces: Upkie supports multiple communication interfaces, including USB, Bluetooth, and Wi-Fi, allowing for seamless connectivity with various devices and systems.
- Battery: A rechargeable lithium-ion battery powers Upkie, providing extended operational time and enabling mobile applications.
- Dimensions: With an approximate height of 30 cm, Upkie is compact and lightweight, making it suitable for both indoor and outdoor environments.
Applications
- Education: Upkie serves as an excellent platform for robotics education, enabling students to learn about concepts such as self-balancing, motion control, and programming in a hands-on manner. Its open-source nature encourages exploration and experimentation, fostering a deeper understanding of robotics principles.
- Research: Researchers can leverage Upkie as a testbed for developing and validating new algorithms and techniques in areas like self-balancing control, path planning, and human-robot interaction. The open-source design allows for easy integration of custom hardware and software components, facilitating advanced research projects.
- Maker Community: Upkie provides an open-ended platform for the maker community, allowing creative individuals to build unique robotic projects and explore their ideas. From entertainment robots to assistive devices, the possibilities are endless, limited only by the user’s imagination.
- Prototyping: With its modular design and programmable capabilities, Upkie can serve as a rapid prototyping platform for robotics startups, enabling them to quickly iterate and test new concepts before committing to full-scale production.
Open-Source Spirit
Upkie embraces the open-source spirit, with its hardware design, control code, and documentation publicly available on GitHub. This transparent approach fosters collaboration, knowledge sharing, and accelerates the pace of innovation within the robotics community. Users can access Upkie’s GitHub repository to obtain detailed technical resources, code examples, and contribute their own improvements and modifications.
By providing an accessible and customizable platform, Upkie aims to democratize robotics technology, empowering individuals, educational institutions, and small teams to explore and contribute to this exciting field. The open-source nature of Upkie ensures that the project remains transparent, adaptable, and continuously evolving, driven by the collective efforts of its passionate community.
This blog post aims to introduce the Upkie robot, helping readers understand its features and applications. If you’re curious about Upkie, feel free to visit the Upkie GitHub repository for more information.
Image source: Upkie GitHub